海中施設での設置と調査作業のためのビジョンベースの位置決め
荒海でも適切な位置を指定
海中は最も過酷な作業環境の 1 つに数えられます。視界が悪く、高い水圧を受け、海流が変化するため、状況は困難になります。常に変化する環境、腐食や堆積物も、海中作業を困難にする要因です。オフショア風力タービンや掘削プラットフォームの作業員にとって、これは日々の作業の一部です。両方とも施設の建設や保守作業に関わります。遠洋で何らかの作業を行う際の重要な基本要件は、いつでも正確に位置を特定することです。Forssea Robotics が提供する NAV CAM SUBSEA ナビゲーションカメラは、潜水機向けのオールインワンシステムで、海中施設の相対位置および絶対位置を正確に決定します。IDS Imaging Development Systems GmbH の産業用カメラが必要な全体像を提供します。
用途
オフショアプラントの位置決めや測定に対して、高い需要が寄せられています。遠洋での個々の施設の正確な位置決定と、ウィンドファームなどのすべての施設の相互の位置関係の両方に当てはまります。精度が必要とされます。環境条件が劣悪であるため、このような領域で使用される機器はできる限りシンプルでインテリジェントに設計しなければなりません。Forssea Robotics の海中ナビゲーションカメラはマーカーを使用してこの問題を解決します。風力タービンの基部など、海中施設に付けられたマークを検出して追跡します。これを基準として、相対位置と絶対位置を計算し、設置および調査作業を実施する基準とします。部品の正確な位置を決定できます。

事前校正済みのカメラがマークを監視し、リアルタイムで画像を内蔵コンピューターに送信して処理します。このコンピューターは V-LOC システム (Visual Localisation System) と呼ばれる特殊なソフトウェアを使用して視覚情報としてまとめて、ナビゲーションメッセージを発行します。すべての計算はカメラ内部で直接実行されます。このため、上部への高帯域データ転送が不要になります。

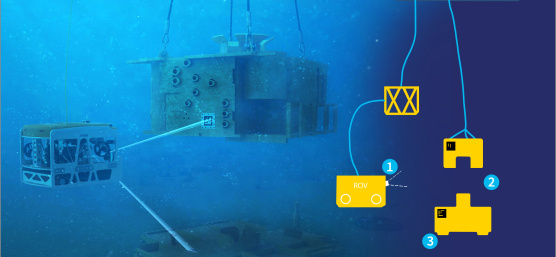
NAV CAM SUBSEA はリモート制御または無人潜水機上 (ROV または AUV) に取り付けられ、ナビゲーションおよびコントロールセンターとして直接機能します。グラフィックスプロセッサーと圧力センサー、さらに対話式ナビゲーションシステムを内蔵しています。既存の ROV システムの場合、自律機能を実現するための最初の一歩となります。リアルタイムでインテリジェンスが組み込まれているからです。V-LOC はマーカーの指す方向と位置を計算します。カメラのコース、傾き、回転角度が ROV によって引き継がれます。ROV の相対 XYZ 精度は、ターゲットから距離 3 m で約 3 mm です。同等のオープンソースシステムの場合は現時点でおよそ 10 ~ 20 mm です。Forssea が提供するマーカーは、25 年を超える寿命と海洋生物付着への耐性が認定されています。

ナビゲーションカメラは、これも Forssea Robotics の開発製品である ROV ARGOS などに設置できます。ARGOS は軽量でインテリジェントな ROV で、500 m までの深度に対応する設計です。簡単な変更操作で、2000 m まで潜水できます。しかし、Forssea カメラはオープンソースタグを使用するので、お客様が専有システムに限定されることはありません。NAV CAM は外部ジャイロセンサー (加速度または位置センサー) または船舶の測量システムとの完全互換性があります。オプションとしてオンデマンド AI ツールボックスを利用でき、マーカーを使用せずに物体をマーク付けして追跡できます。
カメラ
潜水機向けのナビゲーションカメラの稼働場所は特殊なので、内蔵される産業用カメラにも特定の要件が課せられます。画像がすべての位置計算の基準となるのです。
「ダイナミックレンジ、感度、直線性の面で、何の不足もないカメラを求めていました。しかも、コンパクトで予算内の価格である必要がありました。そこで IDS にたどり着きました。UI-5270CP-C-HQ Rev.2 は私たちのすべての要件を満たしています。」
Sony 製 1/1.8 インチグローバルシャッターセンサー IMX265 を搭載したカメラモデルは、GigE インターフェースによって、フレームレート 38 fps で解像度 3.2 MP (2056 x 1542 ピクセル) を実現します。極めて光感度の高いセンサーは、3 MP クラスで最高レベルの CMOS 画像センサーとみなされており、暗い環境でも卓越した画質が保証されます。
UI 5270CP-C-HQ Rev.2 産業用カメラは uEye CP 製品ファミリーのメンバーです。CP は「コンパクトパワー」を示しています。小型ながらあらゆる種類の産業用途に対応するパワーを備え、さまざまなピクセル前処理で優れた機能を発揮します。PoE (Power over Ethernet) で GigE のフル速度でデータを転送し、ケーブル 1 本で 100 m まで動作できます。さまざまな解像度の多数の CMOS センサーから選択でき、uEye CP カメラはオートメーション、自動車、医療技術、ライフサイエンス、物流の分野に適しています。わずか 29 x 29 x 29 mm の特許取得済みハウジング設計を活かして、潜水機に設置されているようなロボット分野にも性能を発揮します。

今後の予定
Forssea Robotics が開発したカメラは主に海中産業で使用されます。さらに同社は、ビジョンベースの位置決定テクノロジーの空中バージョンも開発しています。
NAV CAM AIR はオールインワンのサーフェスベースの視覚的傾斜および位置決定センターで、風力タービンのブレードやその他の上甲板構造を空中で監視します。この場合も、すべての画像はインハウスソフトウェアによってリアルタイムで処理され、高精度の位置情報を取得します。
画像処理により、地上、水中、水面での用途が広がります。あらゆる種類の活動を促進して効率化したり、不可能な作業を可能にしたりできます。この場合、画像処理と IDS 産業用カメラを NAV CAM SUBSEA に組み合わせて、オフショア風力タービンの位置を正確に決定します。後は、風が吹くのを待つだけです。
Forssea Robotics
Forssea Robotics は完全統合されたロボットソリューションを開発し、オフショアエネルギー市場での運用コストを削減します。Forssea の海中ツールには、コスト効果に優れたプラグアンドプレイのハードウェア、専用組み込みインテリジェンス、リアルタイム監視が統合されています。

uEye CP
使用モデル: UI 5270CP-C-HQ Rev.2

彼女は10年以上にわたり、企業概要、パンフレット、事例紹介の制作に携わり、企業関連トピックや技術的な製品コミュニケーションを支援してきました。戦略的B2Bコミュニケーションの経験を活かし、明確なメッセージと確かな根拠に基づくコンテンツを提供します。
プロジェクト
プロジェクトにおいて、どのようなサポートが必要ですか?当社チームが適切なソリューションを見つけるお手伝いをします。
Vision Channel
マシンビジョンに関するビデオとライブセッション
ニュースレタ
最新情報を入手するため、ぜひニュースレターにご登録ください。
用途
産業用カメラが未来をどのように形作っているのか、ぜひご覧ください。