3D 自動認識と木造梁のプリント
まったく同じように裁断
体積と重量の面から、木材は世界で最も重要な原材料です。この天然資材は最古の建築資材の 1 つでもあり、普及が進んでいます。木材は環境にやさしく、健康的で、その他のどの建築資材よりもやすらぎを感じられます。木造住宅の市場シェアを例にとると、過去 10 年間で倍増し、ドイツで建設されたすべての住宅の 15% になりました。生産の中心は建築現場から木工作業所に移っています。ここでは、コスト効果と時間効率をできるだけ向上させて未来に適した状態にするため、自動化が果たす役割の重要性が増しています。最近の例を紹介しましょう。ドイツを拠点とする「Zentrum für Telematik e.V.」は、ドイツの企業 Georg Schumann GmbH & Co. KG のために、木造梁の自動マーキング向けロボット工学ソリューションを開発しました。
用途
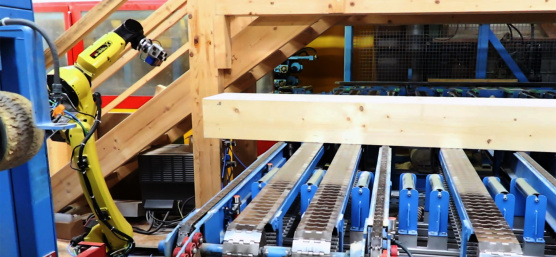
Schumann は製材所および関連する材木取引所を介して、完全自動指物サービスを提供しています。ここで、さまざまな種類の木造梁が製造され、そのすべてにこれまで手作業で印が付けられていました。この場合の印付けには、顧客のニーズに合わせた、多数の角材への数字のマーク付けが含まれています。顧客となるのは一般に大工です。このシステムはさらに、認定 (持続性、原産地) や等級 (品質、デンプン、乾燥度、用途による) のマーク付けなどに使用することもできます。マーク付けプロセスを自動化するため、産業用ロボット、3D カメラ、コンパクトなインクジェットプリントシステムを統合したシステムが開発されました。このソリューションにより、プリント可能な領域、プリント位置の選択、最適な位置合わせとサイズを自動的に決定できます。

パレットの山の中でも明瞭に見えるように、可能な限り、梁の前面にプリントする必要があります。カメラはさまざまな形状の木造梁の位置を認識する必要があります。たとえば、横木の傾斜、掛け釘、プリント面のくぼみはそれぞれ異なります。さらに、上流生産システムにおいて誤差や許容差があるため、ロボット前面の梁の位置がまったく同一になることはありません。このため、ロボットが横木のそれぞれの位置と 3D サーフェスをすばやく確実かつ正確に検出できる、画像処理システムが必要です。
Ensenso N35 カメラを使用して横木の位置と形状を撮影します。角材がプリント位置に設置されると、横木の表面を検出できるように、ロボットがフランジに取り付けられたカメラを自動的に配置します。必要に応じて、カメラを木造梁の周囲の面に移動して、梁の別の側面を別の角度から撮影できるようにします。
 と決定されたプリント位置 (水色の部分) をソフトウェアが 3D 生データから決定します。")
カメラは木造梁の上部を中距離 (40 ~ 90 cm) から、異なる傾斜角度で確認します。2 台のモノクロ CMOS センサー (グローバルシャッター、1280 x 1024 ピクセル)、GigE インターフェース、トリガーとフラッシュ用ねじ止め式 GPIO コネクター、プロジェクターを搭載しています。N35 モデルに内蔵された Flex View テクノロジーは静止物体の 3D 検出に特に適しており、動作距離は最大 3,000 mm です。光線のプロジェクターマスクの位置は、非常に細かいステップで直線上にシフトできます。
それにつれて、同じ被写体シーンの被写体表面上に投影されたテクスチャも移動し、他の補助構造を作成します。同じ被写体のシーンから、テクスチャが異なる複数の画像ペアを撮影すると、さらに多数の画像点が生成されます。解像度が増加します。 解像度に加えて、シフトしたパターン構造によって追加情報が適用されるため、異なる表面上のデータの確実性も増加します。このようにして Ensenso N35 は、木材の表面を最も正確に、低ノイズで検出するという、顧客の要件を満たします。
 と決定されたプリント位置 (水色の部分) をソフトウェアが 3D 生データから決定します。")
ZfT が開発したシステムは取得した生データを変換し、ロボット座標システムでの点群の位置を決定し、梁にあるプリントに適した平面を抽出します。このデータを使用して、所定のテキストのプリント位置、最適なプリントサイズ、位置合わせを計算します。その後、ロボットはカメラシステムが決定したプリント位置に移動し、インクプリンターで実際のプリントを正確に実行します。
「カメラを選ぶ決め手となったのは、撮影ボリュームでのカメラの測定精度と、測定速度でした」と、ZfT の研究助手 Florian Leutert 氏は言います。 「そのうえ、N35 のコンパクトさと防塵・防湿機能も貴重な要素です」 保護クラスは製材現場での木材処理において重要な働きをします。堅牢でコンパクトなアルミニウム製ハウジングの Ensenso N35 3D カメラは、この点で完璧です。保護クラス IP65/67 の要件を満たしているので、塵、埃、水滴、そしてこの例ではインクから保護されます。

付属の Ensenso SDK を使用してカメラのパラメーターを設定し、測定をトリガーして、測定された 3D 点群を読み取ります。ZfT はデータを変換して処理する独自のソフトウェアを開発しました。
今後の予定
「ロボット工学では、堅牢な自動化ソリューションの必要性が高まっていますが、それだけではありません。さまざまな加工品と環境を柔軟に処理できる自動処理プロセスも必要とされています」と Florian Leutert 氏は将来の要件を定義します。これには高品質カメラが必要です。作業領域の 3D 撮影をロボット工学で要求される精度、すなわちサブミリメートル範囲で実行しなければならないからです。IDS の Ensenso ステレオ 3D モデルなら、難なくこなせます。3D ビジョンを堅牢でシンプルにし、そのうえ高速かつ正確に実行します。自動 3D 撮影にとって、信頼できて将来性のあるコンポーネントとなります。その活躍する分野は、多様な梁を「まったく同じように」切り出す木工業に限られません。
Zentrum für Telematik e.V.
「Zentrum für Telematik e.V.」は、テレマティクス技術の可能性について、他にない効果的な方法で業界に成果をもたらしています。とりわけ、画期的な製品とサービスの開発において業界を支援しています。主な用途の領域は、産業プラントのリモートメンテナンスとリモートコミッショニング、安全監視、危険区域での補助要員のサポート、遠隔医療、リモートトレーニングおよび交通管制です。

Ensenso 3D カメラ
使用モデル: Ensenso N35

10年以上にわたり、プレスリリースやアプリケーションレポートを作成し、企業トピックや技術的な製品コミュニケーションを専門知識をもって設計しています。常に真実性と明快さを重視したアプローチを貫き、戦略的なB2Bコミュニケーションにおける豊富な経験により、的確なメッセージを構築し、信頼性の高い技術的コンテンツを提供します。
プロジェクト
プロジェクトにおいて、どのようなサポートが必要ですか?当社チームが適切なソリューションを見つけるお手伝いをします。
Vision Channel
マシンビジョンに関するビデオとライブセッション
ニュースレタ
最新情報を入手するため、ぜひニュースレターにご登録ください。
用途
産業用カメラが未来をどのように形作っているのか、ぜひご覧ください。