Ensenso ソフトウェア開発キット すべての Ensenso 3D カメラに 1 つのソフトウェアで対応
無料の Ensenso SDK で、すべての Ensenso 3D ステレオカメラへのインターフェースが統一されます。
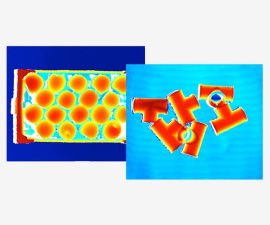
Ensenso PartFinder
Ensenso PartFinder により、ユーザー固有の CAD ジオメトリをロードして、Ensenso 3D カメラの点群から見つけることができます。奥行情報、面法線、テクスチャデータを組み合わせて使用すると、困難な位置決めタスクでも解決できます。PartFinder 機能は標準 NxLib に含まれていますが、使用するには別途ライセンスが必要です。機能の詳細は、この IDS Vision Channel セッションで紹介します。

セミグローバルステレオマッチング
照合度の高いセミグローバルステレオマッチングで、ピクセル単位の XYZ 座標による高密度で高品質の奥行画像が確実に得られます。

ワークスペース校正
Ensenso 校正板を使って、ワークスペースの座標系を簡単に定義できます。

仮想ビュー
ピクセルサイズと方向を固定して、テレセントリックで高さを測定したマップにより、処理が簡単になります。

ハンドアイ校正
移動カメラと 6 軸ロボットに固定したカメラを較正します。

プリミティブ当てはめ
レイヤー、球、円柱などの幾何的物体を取得した点群から抽出します。

パターンゲージ
校正板の位置を高い精度で測定し、回転をリアルタイムで測定します。

JSON ベースの API
C、C++、C# 向けで JSON ベースの、構造化されたオブジェクト指向で拡張が容易な API を使用します。

リモート接続
DLL インターフェースまたは TCP によるリモート API アクセスで処理データや校正データを簡単にやり取りします。

マルチビュー
複数のステレオカメラを組み合わせて、テクスチャ情報付き点群の 1 つの撮影システムを作り上げます。

シーンレンダリング
複数のカメラで撮影されたテクスチャ情報付きの面を 3D で仮想視覚化します。

PatchMatch ステレオマッチング
異なる画像セクション間の対応関係を見つけるためのランダム化されたアルゴリズムにより、一度の実行でワークスペース全体のステレオマッチングが可能(FlexViewの有無にかかわらず使用可能です)
NxView
NxView はソースコード付きのサンプルプログラムで、NxLib ライブラリのメイン関数のデモを示しています。1 台または複数のステレオまたはカラーカメラを開いて、取得したテクスチャと奥行データを視覚化します。露出時間、ビニング、AOI、ステレオマッチングの体積などのパラメーターも、インタラクティブに調整できます。
NxLib
NxLib は SDK のコアライブラリです。ステレオマッチングアルゴリズム、校正および処理機能が含まれています。
HALCON インターフェース
HALCON 画像撮影インターフェースによって、Ensenso カメラを HALCON および HDevelop に簡単に統合できます。
サンプルプログラム
HDevelop スクリプトや、C、C++ および C# の多数のサンプルプログラムを利用すると、NxLib API の処理が簡単になります。