
安全な核廃棄物処理のための Ensenso 3D カメラ搭載のロボット支援システム
慎重な取り扱い
核施設の廃炉は、事業者にとって大きな課題が伴います。廃炉にしろ安全な封じ込めにしろ、廃棄対象の核廃棄物の量は世界中で驚くべき速度で増加しています。核廃棄物の処理への自動化の必要性が増していますが、核産業は安全性の理由から全自動のロボット制御法には腰が重く、危険な環境ではリモート制御の産業ロボットが好まれています。しかし、ジョイスティックやビデオ監視カメラの力を借りた、リモート制御の把持や未知の物体の切断などの複雑な作業は、制御が困難で、不可能な場合すらあります。
このプロセスを簡素化するため、英国バーミンガム大学の Extreme Robotics Lab が主導する National Centre for Nuclear Robotics では、核廃棄物向けの自動処理手法を研究しています。この研究で開発されたロボット支援システムは「共有」制御により、触覚フィードバックと Ensenso 3D カメラから提供される視覚情報により、複雑な操作タスクを実行できます。オペレーターは常に操作ループ内に加わり、システム障害の発生時にはロボットの自動操作の制御を引き継げます。
アプリケーション
展示会でつかみ取りマシンを試してみたことがあるなら、おわかりになるでしょう。つかみ取りアームの手動制御は単純です。うさぎのぬいぐるみを掴むのに失敗するのはご愛敬ですが、放射性廃棄物の処理の場合、失敗すると大きな影響があります。人間や環境に重大な影響をもたらす存在を防ぐため、ロボットはシーン内の放射性物質を極めて高い精度で検出し、精密に操作できなければなりません。オペレーターは文字通りロボットを手にとり、正しい把持位置を判定するのはオペレーターの責任です。
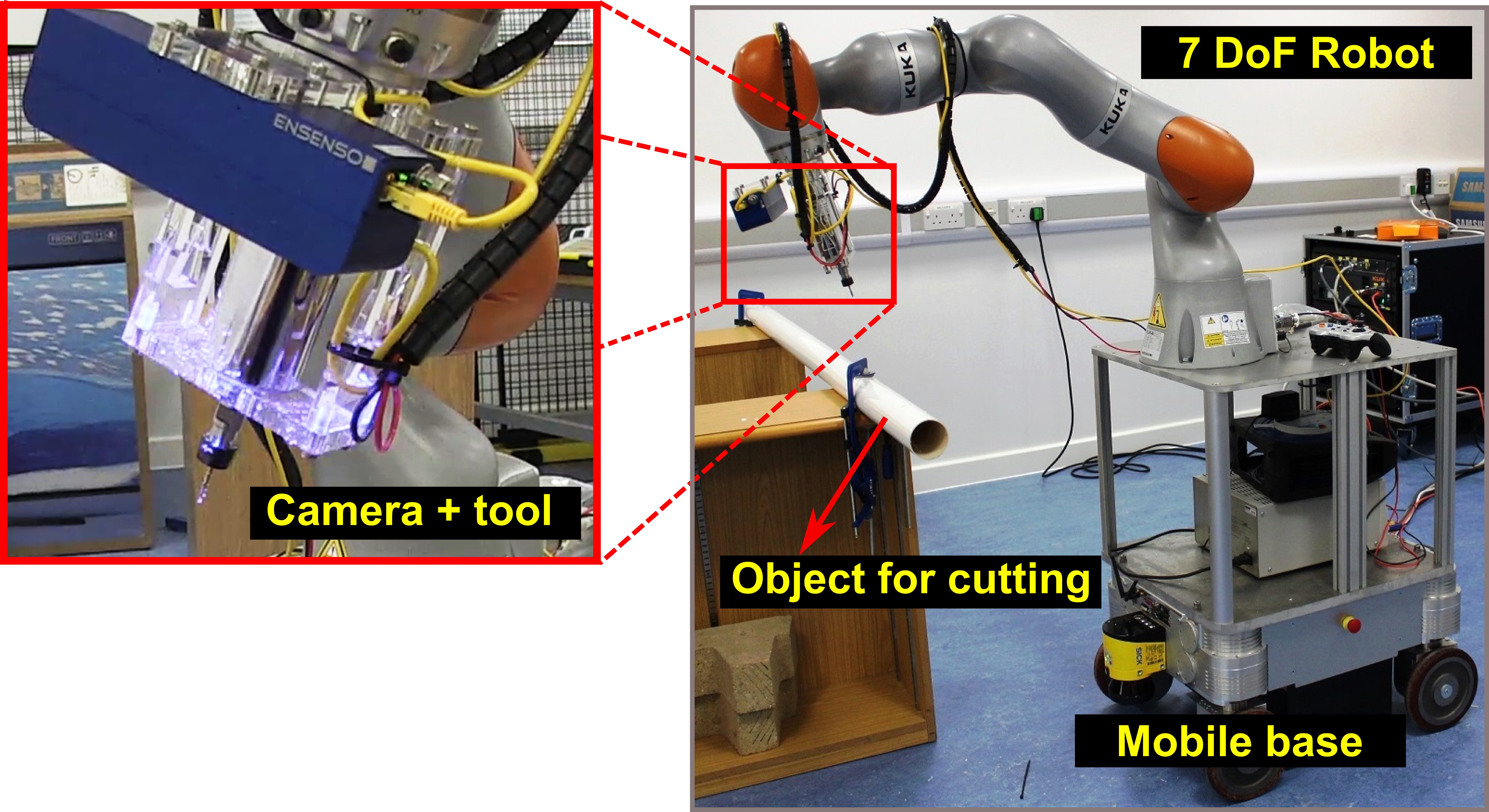
同時に、オペレーターはインバースキネマティクス (逆運動) を正しく評価して、正しい位置に配置して衝突を避けるため、ロボットのアーム部品の連結角度を正しく判定する必要があります。英国の研究者が開発した支援システムは、このタスクを大幅に簡易化し、高速化します。このシステムには、並行ジョーグリッパーと Ensenso N35 3D カメラを搭載した標準の産業用ロボットが使用されています。
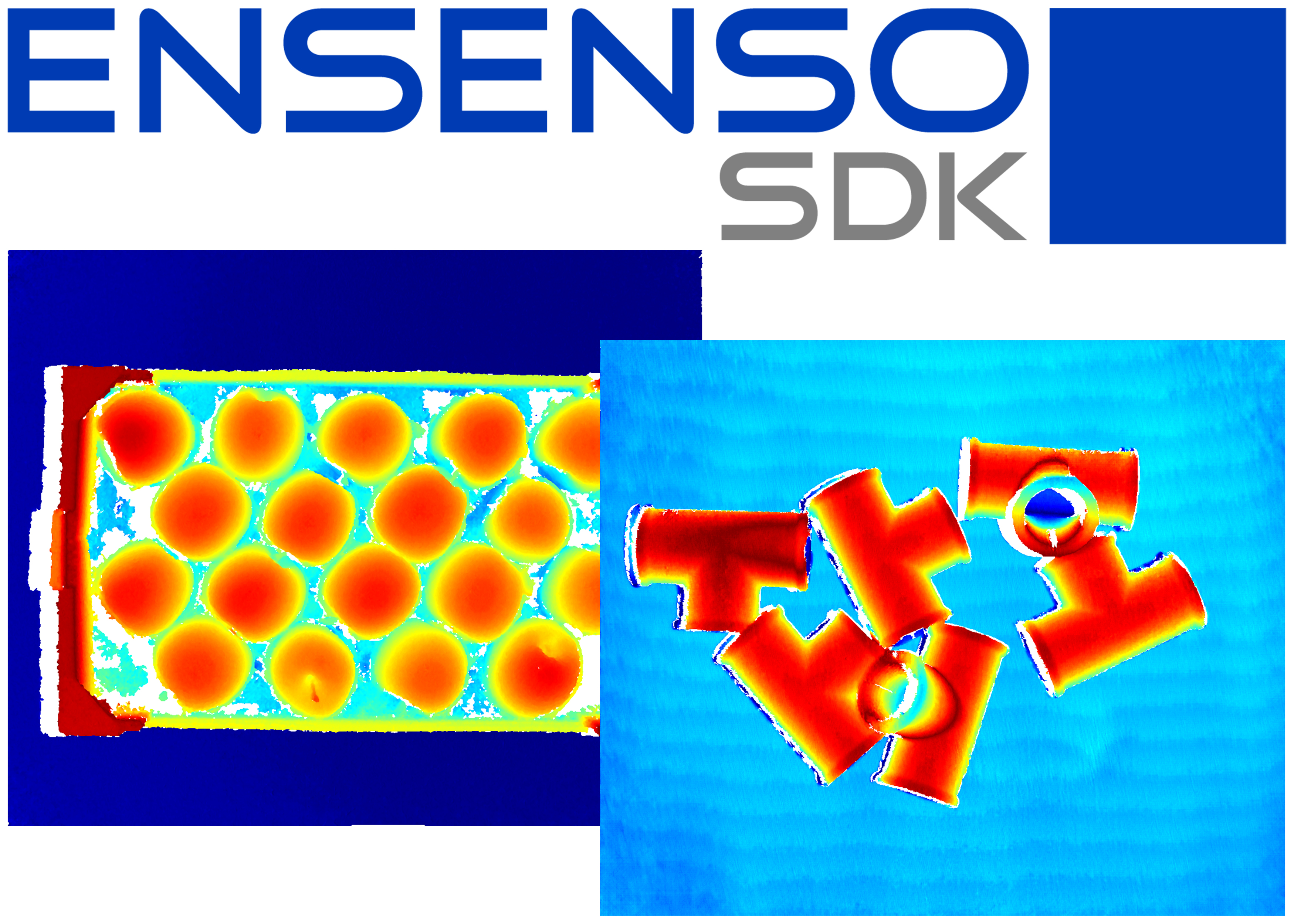
未知の廃棄物を自律的にスキャンし、点群の形式で 3D モデルを作成します。Ensenso 3D カメラは、人間の視覚をモデル化した空間ビジョン (ステレオビジョン) の原理に従って動作するので、非常に精度が高くなります。2 台のカメラで物体を異なる位置から観察します。両方のカメラが撮影した画像コンテンツは同一のように見えますが、撮影する物体の位置の違いによる差異が反映されます。カメラの視野角と距離、および光学機器の焦点距離は既知なので、Ensenso ソフトウェアは、各画像ピクセルの物体の 3D 座標を特定できます。この場合、カメラの異なるスキャン位置を使用してシーンが撮影されて組み合わされ、あらゆる視界から見た完全な 3D サーフェスが得られます。Ensenso の校正ルーチンにより、個々の点群をグローバル座標系に変換でき、仮想イメージ全体が向上します。この結果、生成される点群には、正しい把持または切断位置をロボットに伝達するために必要なすべての空間物体情報が含まれます。

ソフトウェアのサポートにより、Enseno 3D カメラはオペレーターによる奥行き情報の認識と評価を実行するので、認識負荷は大幅に削減されます。支援システムには、把持対象の物体の触覚特性と、特殊な把持アルゴリズムが組み合わされています。「システムではシーン群を使用して、複数の安定した把持位置を自動的に生成します。
「3D カメラが取得する点群は高解像度で稠密なので、シーン内の各物体に対して非常に精度が高い把持位置を生成できます。」
これをベースとして、私たちの「仮説ランキングアルゴリズム」は、次に取り上げる物体を、ロボットの現在位置を基準に判定します」と、National Centre for Nuclear Robotics の上級リサーチサイエンティストである Naresh Marturi 博士は説明します。
原理は、他のスティックを動かさずに 1 本のスティックを抜き去るスキルゲームの Mikado と似ています。決定されたパスのガイドにより、ロボットはスムーズに、目的のパスに沿ってターゲットの把持位置まで均一に移動できます。ナビゲーションシステムと同様に、オペレーターがロボットアームを安全に把持できるよう案内し、必要に応じて、他の未知の危険な物体を回避するよう支援します。このために安全な経路を計算し、オペレーターが触覚フィードバックによって経路を外れないようにサポートします。
 Extreme Robotic Lab")
システムはオペレーターの自然な手の動きを正確かつ確実に、対応するロボットの移動にリアルタイムでマッピングします。オペレーターは常に手動制御を維持し、コンポーネントが失敗しても制御を引き継げます。AI をオフにして、「強制フィードバックモード」を有効にして人間の判断に戻すだけです。人間と機械との共有制御の原理により、常にシステムを制御下に置くことができ、これは危険度が最も高い環境で重要な点です。
カメラ
「自律的把持計画、リモート制御、視覚的物体追跡のすべてのタスクについて、他のツールに加えて青色 LED (465nm) をロボットのエンドエフェクターに搭載した Ensenso N35 モデル 3D カメラを使用しています」と、Naresh Marturi 博士は言います。今のところ、Extreme Robotic Lab のシステムのほとんどに、1 台の 3D カメラが取り付けられています。「しかし、3D モデルの構築プロセスを迅速化するため、最近ではシステムをアップグレードして、1 台のオンボードロボットに加えてさらに 3 台の Ensenso 3D カメラを使用できるようにしました」
Ensenso N シリーズはこのタスクにうってつけです。過酷な環境条件の用途専用に設計されています。コンパクト設計の N シリーズは、移動および静止物体を 3D 検出するロボットアーム上で、省スペースの静止または移動用途にも適しています。照明が暗い条件でも、内蔵プロジェクターがランダムドットパターンによるパターンマスクを使用して高輝度テクスチャを撮影対象の被写体上に投影し、被写体表面にない、またはわずかな構造を補完します。N30 モデルのアルミニウム製ハウジングは電子部品の放熱性能に最適で、過酷な環境条件でも安定した光を出力します。このため、高品質で確実な 3D データを一定して提供できます。照明が暗い条件でも、内蔵プロジェクターがランダムドットパターンによるパターンマスクを使用して高輝度テクスチャを撮影対象の被写体上に投影し、被写体表面にない、またはわずかな構造を補完します。
Ensenso N カメラファミリーのカメラはセットアップが簡単で、Ensenso SDK を介して動作します。GPU ベースの画像処理によって 3D データ処理をさらにスピードアップし、マルチカメラ動作で使用されるすべてのカメラから 1 つの 3D 点群を出力できます。これは、複数の視野角からの 3D 点群をその場で構成する場合にも必要です。
支援システムについて、研究者はカメラで撮影された 3D 点群を処理する独自のソフトウェアを C++ で開発しました。「私たちのソフトウェアは Ensenso SDK (マルチスレッド) とその校正ルーチンを使用して、テクスチャを高解像度点群にオーバーレイし、このテクスチャ化された点群を世界座標に変換します」と Naresh Marturi 博士は説明します。「Ensenso SDK は私たちの C++ ソフトウェアにとても観点に統合できます。点群やカメラ画像を撮影し、処理するための、わかりやすい多彩な関数とメソッドがあります。さらに、CUDA のサポートにより、SDK ルーチンで複数の高解像度点群を登録して、高品質のシーンクラウドをグローバルフレームに生成できます。これは私たちにとって非常に重要で、特に精密な把持の仮説の生成にとって重要です」
システムの主な利点:
- オペレーターは、シーンの奥行きや、物体へのアプローチ方法や把持位置について、検討する必要がありません。システムが何もかもをバックグラウンドで判断し、ロボットが物体を最適に把持できる場所にオペレーターが正しく移動できるようにします。
- 触覚フィードバックにより、ロボットがオペレーターの目の前になくても、オペレーターは手の中のロボットを感じることができます。
- 触覚と把持計画を組み合わせて、オペレーターはリモートシーンでも物体を非常に簡単に、非常にすばやく移動でき、認識負荷はきわめて低くなります。
これによって時間とコストが節約され、ミスが減少し、安全性が高まります。

今後の予定
バーミンガム大学の Extreme Robotic Lab は現在、並行ジョーグリッパーではなく、多指ハンドを使用できるように、手法の拡張を開発しています。これにより、複雑な物体を把持する際の柔軟性と確実性が向上します。将来的には、オペレーターはリモート制御されたロボットのどの指を使用して物体をつかんでいるか、力を感じられるようにもなります。完全自律型の把持手法も開発中で、ロボットアームは AI で制御され、自動ビジョンシステムがガイドします。チームは、人間とロボットの協働を改善してリモートロボットを「共有制御」システムで制御する可視化ツールにも取り組んでいます。
これは私たち全員の安全と健康にとって有望なアプローチです。結局のところ、核廃棄物などの危険物の処理は、私たち全員が懸念する問題だからです。該当する物体情報を確実に取得する Ensenso 3D カメラは、この世界的に緊急度が高まっているタスクに重要な働きをします。
Universität Birmingham
英国バーミンガム大学の Extreme Robotics Lab は、原子力運転のロボット化に向けて増加する業務に必要な多数の構成要素において市場をリードしています。

Ensenso 3D カメラ
使用モデル:Ensenso N35

10年以上にわたり、プレスリリースやアプリケーションレポートを作成し、企業トピックや技術的な製品コミュニケーションを専門知識をもって設計しています。常に真実性と明快さを重視したアプローチを貫き、戦略的なB2Bコミュニケーションにおける豊富な経験により、的確なメッセージを構築し、信頼性の高い技術的コンテンツを提供します。
プロジェクト
プロジェクトにおいて、どのようなサポートが必要ですか?当社チームが適切なソリューションを見つけるお手伝いをします。
Vision Channel
マシンビジョンに関するビデオとライブセッション
ニュースレタ
最新情報を入手するため、ぜひニュースレターにご登録ください。
用途
産業用カメラが未来をどのように形作っているのか、ぜひご覧ください。