
Ensenso の 3D 動作 投影されたテクスチャステレオビジョンの動作
ステレオビジョン
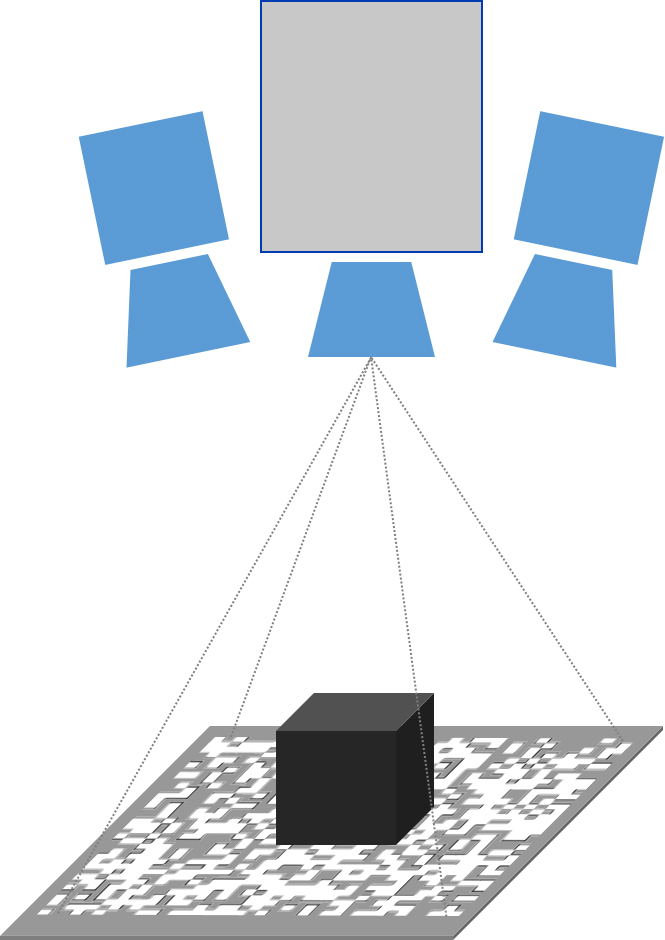
Ensenso ステレオビジョンカメラは人間に視覚を模倣しています。2 台のカメラが同じシーンの画像を別の 2 つの位置から撮影します。

2 台のカメラが同じシーンの画像を別の 2 つの位置から撮影します。カメラは同じシーンを撮影しますが、カメラの投影光によって被写体の位置は異なります。特別な照合アルゴリズムで 2 つの画像を比較し、対応する点を検索してすべての点の位置を視差マップとして視覚化します。
カメラの距離と視野角、レンズの焦点距離がわかっているので、Ensenso ソフトウェアは三角測量の原理に従ってこの視差を変換します。このようにして、各画像ピクセルの 3D 座標を判定できます。結果は 3D 点群となり、3D オブジェクト情報に基づく今後のアプリケーションの基盤となります。
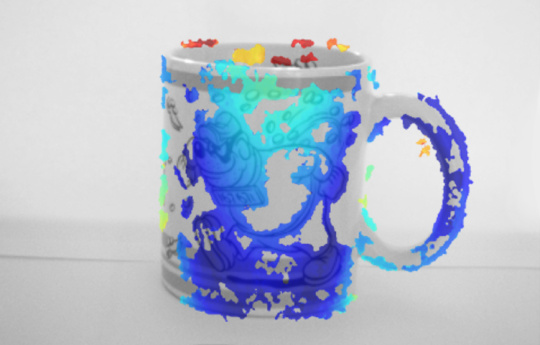
画像比較における照合プロセスは、センサーピクセルのコントラストおよび輝度のグラデーションをベースとしています。したがって、ステレオビジョン品質は、シーンの照明条件と被写体表面のテクスチャに直接的な影響を受けます。対応する点の検出と座標の計算は、テクスチャ情報が少ない面や反射面では非常に困難になります。視差を一意に判定できません。そのため、シーンの奥行情報が不完全になります。
Ensenso カメラはパターン投影を追加使用して従来のステレオビジョンの原理を改良し、奥行情報の品質と測定結果の精度を向上させました。このため、ステレオビジョンを使用できる用途の幅が広がりました。
パターンプロジェクター
集光性の高いプロジェクターは、パターンマスクを使用して、暗い環境でも被写体の表面上のテクスチャを高コントラストで照らします。投影されたテクスチャは、コントラストが弱い、または存在しない被写体表面の構造を補います。
このため、この原理は「射影テクスチャステレオビジョン」とも呼ばれています。詳細度の高い視差マップと、完成度が高く均質なシーンの奥行情報が得られます。

FlexView
FlexView 技術によって、静的シーンの視差マップの詳細度をさらに向上できます。投影光でのパターンマスクの位置を、圧電アクチュエーターを使用する機械システムによって、小刻みに変換できます。これによって、被写体表面のさまざまなテクスチャを表現できます。同じ被写体のシーンから、テクスチャが異なる複数の画像ペアを撮影すると、さらに多数の画像点が生成されます。解像度が増加します。獲得したすべての画像ペアを使用して、照合アルゴリズムで大幅に改善された視差マップが計算されます。
テクスチャ変位によって、光沢面や暗い面、反射面の構造情報が追加で生成されるので、解像度だけではなく、結果データの確実性も向上します。解像度の向上とノイズの低下は、多数の処理アルゴリズムに利点をもたらします。FlexView によって、点群の後処理手順や 3D 処理時間が減少します。
FlexView での画像収集。測定タスクのような品質検査や歯車の歯のカウント用などのアプリケーションの必要な詳細を提供します。
高速データレートでの FlexView を使用しない画像収集。ビンピッキングや出席チェックなどのアプリケーションに使用します。
FlexView1 および 2、シングルショットデータの比較
Ensenso には、FlexView 技術搭載モデルと非搭載モデルのカメラがあります。それぞれ特定の用途向けに最適化および調整されています。このとき、被写体が移動するかどうかが決定要因となります。
FlexView 非搭載カメラと FlexView1 技術搭載カメラは、ランダムドットパターンを使用して高コントラストテクスチャを生成します。画像ペアが 1 組しかなくても、奥行情報を非常に高速に計算できます。両方のカメラモデルは、いずれも被写体が移動する用途に適しています。
静止した被写体を使用して、FlexView1 搭載カメラはアルゴリズムも活用し、複数の画像ペアを変換したドットパターンと組み合わせて高解像度を実現します。画像ペアが 3 ~ 5 組あれば、X、Y、Z 解像度を倍増できます。ただし、画像ペアを追加するたびに、獲得および処理が増加します。約 8 組の画像ペアで、FlexView1 では画質向上は頭打ちになります。
FlexView2 技術を実装しているカメラは、静止した被写体の X、Y、Z 方向の解像度を FlexView1 の 2 倍にできるアルゴリズムによる、特殊設計のパターンマスクを使用します。
制約事項として、特殊パターンにより、5 組以上の画像ペアがないと最適化が有効になりません。

FlexView 非搭載カメラと FlexView1 搭載カメラの、プロジェクターマークとして使用されたランダムドットパターン。シングルショットデータ向けに最適化。

FlexView2 パターンでの輝度グラデーションの補強により、被写体の奥行情報を 5 組以上の画像ペアで計算するアル ゴリズムでサポートします。ただし、これらの輝度グラデーションにより、シングルショットデータにおけるパターンの実効性が低下します。
Flexiew なし
(シングルショットデータ)
高速アプリケーションおよび移動する被写体に適切
1 組の画像ペアのみを使用して、画像撮影と処理を超高速に実施
移動または静止する被写体に使用可能
シングルショットデータ向けに最適化されたプロジェクターパターン
FlexView1 および FlexView2
(マルチ撮影モード)
被写体が静止し、高精度の画質が必要な用途に適切
静止したシーンにおける解像度および奥行情報の品質が大幅に改善
被写体の細部と輪郭の精細化
暗い面、反射、テクスチャ情報の少ない面への確実性を強化
静止した被写体のみに適切
撮影時間および処理時間が長い
組み込み 3D ビジョン
新しい Ensenso XR シリーズの統合データ処理は、特に静止シーンにおいて、最大 16 組の画像で FlexView 2 テクノロジーを最適に使用できるようサポートします。Ensenso ステレオ処理では計算能力を多用しますが、このすべてがハードウェアアクセラレーションによってカメラ上で実行されます。このため、ネットワーク転送の時間が不要になり、画像の取得と処理を連携できます。FlexView 2 テクノロジーとカメラの FPGA でのステレオ処理の高度な並列化により、静止物体の高解像度点群を高フレームレートで生成できます。生成された 3D データの品質は画像解像度と各画像ペアによって向上し、ホスト PC にデータを転送する時間の遅延はありません。