
Ensenso の 3D 動作
AI レーザーの三角測量の仕組み
構造化照明で 3D を表示
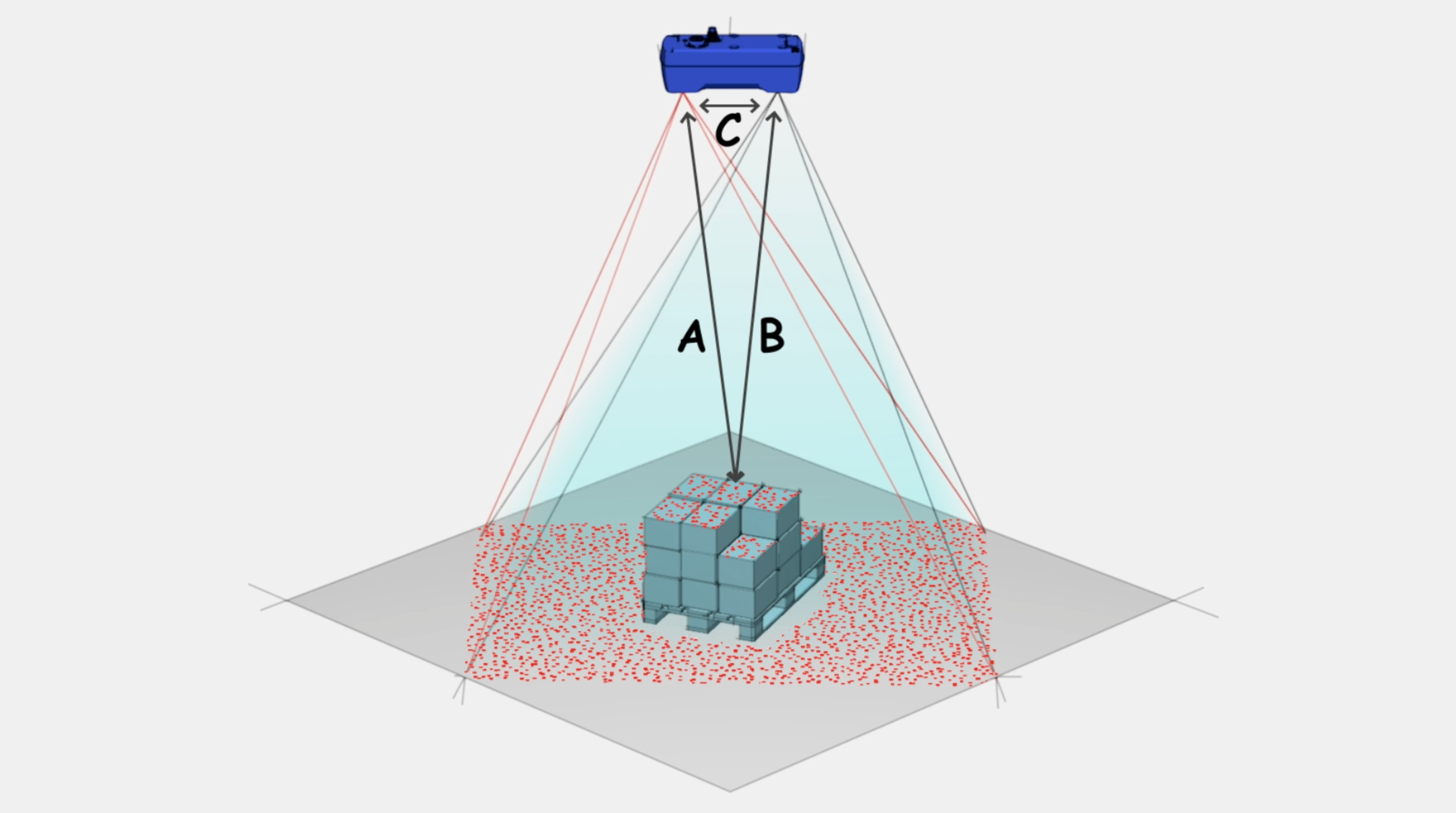
Ensenso S シリーズカメラは構造化照明を使用して動作します。赤外線 (IR) レーザーがランダムなドットパターンを物体表面に投影し、少しずつずらした場所からカメラが録画します。 しかし、ドットパターンの画像は物体が光を反射するところで異なります。対応するレーザー画像ドットは、物体と光源との距離に応じて、予期される位置とずれが生じます。このドット位置のずれが奥行情報の基盤となります。
LIDAR や Time of Flight (ToF) など、レーザーライトに基づく 3D 手法とは異なり、撮影された投影ポイントと点群の空間的奥行は光の遅延を測定しても生成されず、Ensenso ステレオビジョンカメラで使用される三角測量から生成されます。
レーザーポイントの位置のずれ (すなわち「視差」) に基づいて計算し、ステレオビジョンとして 2 つの視野角から計算されます。ただし、Ensenso S が使用する 3D 手法は、1 台のカメラで物体空間のみを記録します。投影パターンの 1 台のカメラによる画像からポイントの位置の違いをどのようにして抽出するのでしょうか?
プロジェクター自身が必要な情報を提供します。DOE 投影 (回折光学) により、ポイント位置が既知である固定された「ポイント画像」が生成されます。2 つのポイント画像の距離と視野角がわかっているので、Ensenso ソフトウェア三角測量手順で各 (可視) レーザーポイントの 3D 座標を決定できます。
構造化照明
IR レーザーは固定パターンの光線ドットを物体空間に投影します。回折光学 (DOE) を使用してドットパターンを作成します。微細なマイクロ構造により、レーザー光を分岐および回折させ、目的の光分散を作成します。
DOE によって光の一様な強度分布が可能になり、ほとんど損失なしにビームエネルギーを放出できます。ナローバンドレーザー光と組み合わせると、非常に高いコントラストのドットパターンを暗い条件でも作成できます。
AI で高速化されたポイントマッチング
三角測量を使用して奥行情報を計算するには、各投影ポイントに対して対応する画像ポイントを先に決定する必要があります。ただし、期待されるポイントの位置がぶった以上の光の反射で移動してしまう場合、多数の中から 1 つのポイントを見分けるのはルールベースの画像処理アルゴリズムでは簡単なことではありません。その解決策が「人工知能」です。
無数のバリエーションがある特徴の認識と分類により適したテクノロジーは何でしょうか。Ensenso ソフトウェアは ANN (人工ニューラルネットワーク) をカメラ画像でのポイント識別に使用しています。このネットワークは使用されるパターンのくぼみやゆがみについて事前学習済みです。
AI レーザーポイント三角測量のメリット
奥行の高い精度
ANN ポイントマッチングの成功率が高く、高精度の奥行情報を持つ確実で幾何学的に正確な 3D データ
暗い光
IR 照明により、暗い環境でも動作
高速撮影
1 つの画像ペアのみが処理されるため、画像撮影と評価が高速

AI アクセラレーション
ANN アクセラレーションにより、毎秒最大 20 点群

モーションブラーなし
短い露出時間と高レーザー放出により、モーションブラーがなく、移動物体に最適
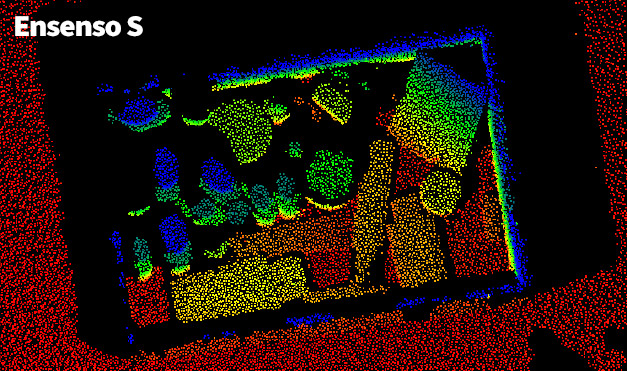
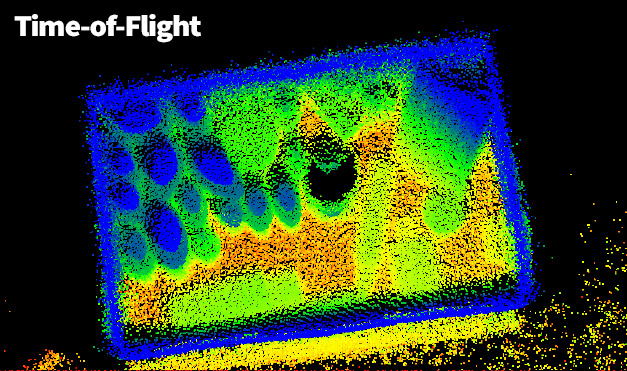
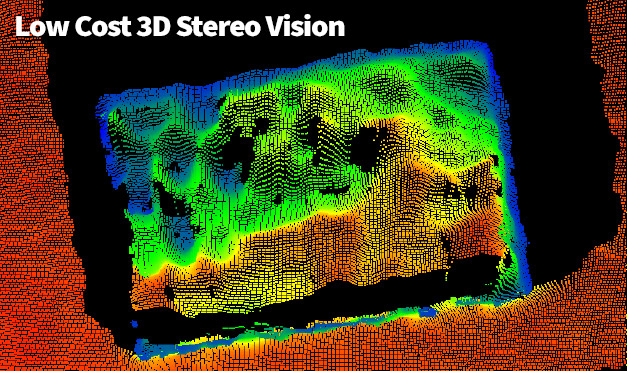
(*) Ensenso S10 は、TOF (Time OF Flight) または低コストの 3D ステレオビジョンテクノロジーを使用する 3D カメラよりも、幾何学的に正確な奥行情報の 3D データを生成します。
ENSENSO 選択ツール
Ensenso カメラ選択ツールで、コンポーネントを簡単に選択できます。作業条件を入力すると、オンライン構成ツールから、用途に最適な Ensenso システムが提案されます。


